|
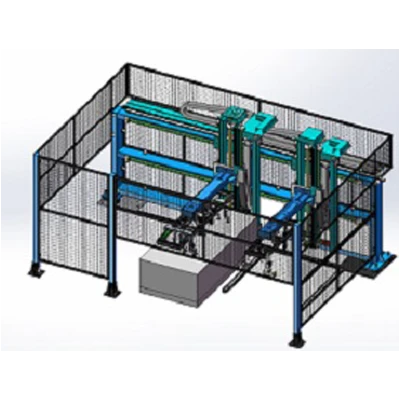
Función e introducción
Agarrando el vaso y poniéndolo en la línea de transmisión.
1.El sistema de carga de vidrio consta de un brazo robótico móvil de vidrio y un brazo robótico de recolección de papel.
2.La máquina contiene dos estaciones de almacenamiento de vidrio y una estación de almacenamiento de papel.
3.El brazo del robot móvil de vidrio coloca el vidrio en la línea de transmisión y, al mismo tiempo, el brazo del robot de recolección de papel retira el papel.
4.La máquina impulsada por un servomotor, la ventosa atrae el vidrio a la estación designada.
5.El brazo del robot de carga de vidrio tiene una estructura en voladizo y el brazo del robot de recolección de papel es una estructura de pórtico.
Parámetro principal
Formato del módulo: (1580-2000)mm*(800-1000)mm
Tiempo del ciclo :<35s
Max capacity: >2468/día
Operador en línea: ninguno
Potencia nominal: 8,26 kw
Presión: 0.7MPa+0.1
Voltaje de entrada: 380V
Dimensión: 4610mmx2780mmx2150mm
Ventaja
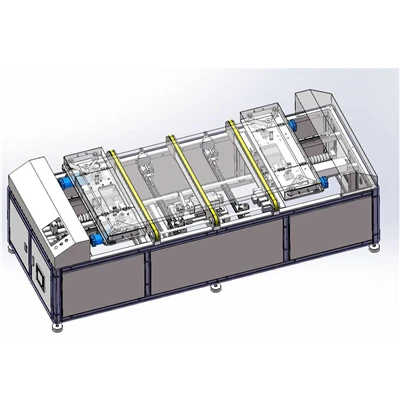
1.La máquina utiliza una estructura de acero con cuerpo de marco soldado, alta resistencia, confiabilidad y solidez durante la carga.
2.La placa de succión del soporte de vidrio está hecha de poliuretano que no imprime en el vidrio durante la carga.
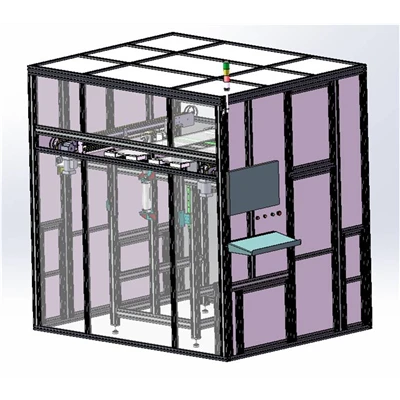
3.El servomotor tiene un funcionamiento preciso y estable.
4.La máquina está equipada con una valla de seguridad para garantizar la seguridad de funcionamiento.
5.Reducir la incertidumbre de la carga por parte del operador, mejorar la producción.
6.La máquina es completamente automática y no requiere interferencia humana.
|